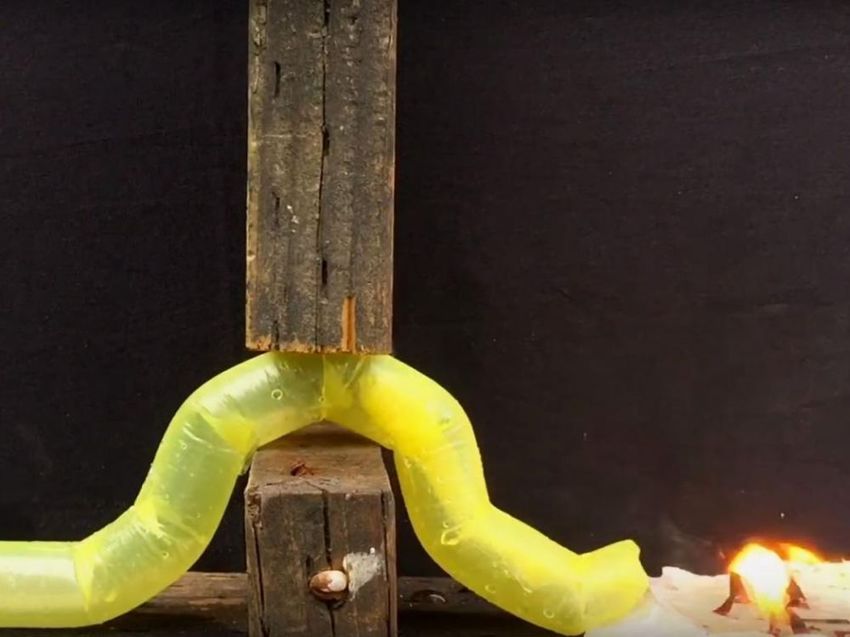

Si les concepts de robots secouristes ne manquent pas, ils reposent tous, plus ou moins, sur des modes de locomotions assez classiques : roues, pattes voire chenilles ! Celui que viennent de présenter des chercheurs de l’université Stanford (Californie) est beaucoup plus original. Il s’inspire à la fois de la croissance d’une plante grimpante et d’une chaussette sale. Il faut effectivement s’imaginer un tube souple qui s’allonge au fur et à mesure qu’il progresse dans les décombres, pénétrant dans les plus petits interstices, montant le long d’une paroi ou contournant un obstacle. Cet allongement est basé sur un mécanisme appelé “éversion” qui consiste à déployer vers l’extérieur les bords d’un orifice. C’est exactement ce qu’il se passe quand on retourne une chaussette sale, avant de la mettre dans la machine à laver. Dans le cas du robot, ce mouvement d’éversion est produit par pression pneumatique, c’est-à-dire en envoyant de l’air pour que le tube encore replié à l’intérieur se déploie progressivement vers l’extérieur. L’extrémité peut alors être équipée d’une caméra qui permet aux secouristes de s’orienter dans les décombres tout en les inspectant.
Sourced through Scoop.it from: www.sciencesetavenir.fr





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leave A Comment